导读:前几天,中国空间站的机械臂“类手臂”的设计圈粉无数,特别是其可爬行的功能让人赞不绝口。机械臂整机自重738kg,刨去7个驱动电机,真正承重的结构并不重,那么它是如何带动25吨的载荷的呢?太空是失重环境,机械臂的载荷25吨到底有何意义?
1、引言
6月17日,随着神舟十二号的升空,中国空间站终于迎来首批到访人员。多项任务逐渐展开,中国空间站也逐渐揭开了其神秘的面纱。其中,空间站机械臂因其“类手臂”的特殊设计,在某剧“剪卫星”的梗下,被网友们津津乐道,乐此不疲。

空间站机械臂在辅助航天员作业
这个空间站机械臂采用“3+1+3”的方式,高度模拟了人体手臂的运动方式,即:肩部和腕部可以绕三个方向旋转,肘部可以绕一个方向旋转,总共7个自由度(即7个旋转方向)。其中,肩部和腕部的三个旋转方向配合使用,可以实现360°无死角工作。
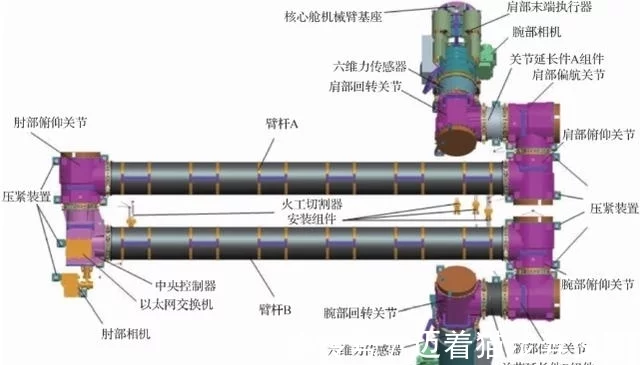
核心舱机械臂[1]
核心舱机械臂展开长度10.2m[2],自身总质量738kg,相当于10个成年人的重量。最大承载能力25吨,相当于一个重型卡车的重量。十个成年人显然抬不起来一辆重型卡车,但是这个核心舱机械臂却可以承受25吨的载荷。另外,机械臂7个自由度,就表示其有7个驱动电机,所以整个机械臂,估计一大半质量都是驱动电机,真正承载的筒状结构其质量并不大。那么,为什么这么轻的结构却可以承受25吨的载荷呢?
2、地面上的机械臂承载能力
当机械臂一端固定,另一端捕获物体进行作业时,临界状态下机械臂可以简化为一根长10.2m的悬臂梁,直径约300mm。航天用的材料一般是铝镁合金或者钛合金,以追求高强度、轻质量。这里以铝镁合金来计算,其密度约2.66g/cm3,性能好一点的合金材料屈服应力约380MPa[3],许用应力253MPa。

悬臂梁模型
如果以实心圆截面计算,10.2m长的悬臂梁,一端载荷可以达到2.6e9N,即2.6e5吨的重物,远超25吨。由于机械臂的直径是限定的,300mm,比较大,所以其承弯能力较好。即便实际结构是空心圆截面,在地面上的静载荷也差不多是这个量级左右。但是,筒结构虽能承受25吨,关节处的驱动电机却不一定能够承受。临界状态下,驱动力矩必须大于2.55e6Nm。普通电机的扭矩大概是几百到几千的数量级,如此巨大的驱动力矩,即便是航天领域也不会特地去定制这样一个电机。
我们可以想象一样,用一根直径300mm的铝镁合金长杆,依靠直径差不多大小的驱动电机,在地面上是很难吊起一个25吨的重型卡车的。不在于长杆结不结实,而在于电机有没有这样的能力。此外,机械臂实为两段,7个电机的安装连接位置都是整个结构的薄弱环节。由此可见,机械臂25吨的极限载荷并不是地面的载荷。实际上,机械臂在太空环境下作业,地面载荷对其没有太大意义。
3、太空中的机械臂承载能力
太空中,机械臂随着空间站一起绕着地球运动,它们两者是相对静止的状态。由于绕地运动,空间站和机械臂都处于失重的状态。也就是说,在太空中,重量的概念已经没有意义了。胖子和瘦子在太空中拔河,是不分胜负的。

空间站绕地飞行
在太空中,要移动一个物体,很小的力都可以让其发生运动。宇航员在舱外,手指轻轻一点空间站,两者就会分开。这时候分开的速度跟质量有关,必须符合动量守恒。当机械臂在进行轨道器对接的时候,一端固定在空间站上,另一端需要伸出固定在被对接的轨道器上。当把轨道器拉进空间站时,由于动量守恒,空间站本身也向轨道器靠近。拉进的过程中,所使用的力其实并不大,但是,空间站的轨道位置发生了些许改变。当目标轨道器质量越大,位置改变也就越大,显然这是不允许有太大位移的。所以25吨的载荷极限,一部分原因就在于此。

机械臂进行对接作业
太空中依然存在着惯性,而惯性也是机械臂承载极限25吨的另一个原因。当机械臂想要带动一个25吨的重物,其速度从0开始增加,存在着一个加速度,从而导致“惯性力”的存在。质量越大,惯性力也就越大,这就对驱动电机的要求非常高了。在启动的瞬间,必须有较好的抗“冲击”的能力。
除了这个惯性力,电机还必须有较好的控制精度。由于质量越大,惯性越大。想要带动25吨的重物开始运动,在启动阶段控制起来较为困难。如果不计作业时间,可以通过慢慢加速的方式,这样对电机的要求稍微小一些。但是,实际情况显然不是。
4、总结
空间站机械臂25吨的极限载荷,并不是地面上结构强度所决定的。而是由于惯性的原因,电机控制能力所决定的,同时动量守恒定理也在发挥作用。

